1. Introduction¶
1.1. Purpose¶
FMDT is derived from a software which was designed to detect meteors on board ISS or a CubeSat. FMDT is foreseen to be applied to airborne camera systems, e.g. in atmospheric balloons or aircraft. It is robust to camera movements by a motion compensation algorithm.
FMDT is ready for real-time processing on small boards like Raspberry Pi 4 or Nvidia Jetson Nano for embedded systems. For instance, on the Raspberry Pi 4 (@ 1.5 GHz), FMDT is able to compute 30 frames per second on a HD video sequence while the instant power is only around 4 Watts.
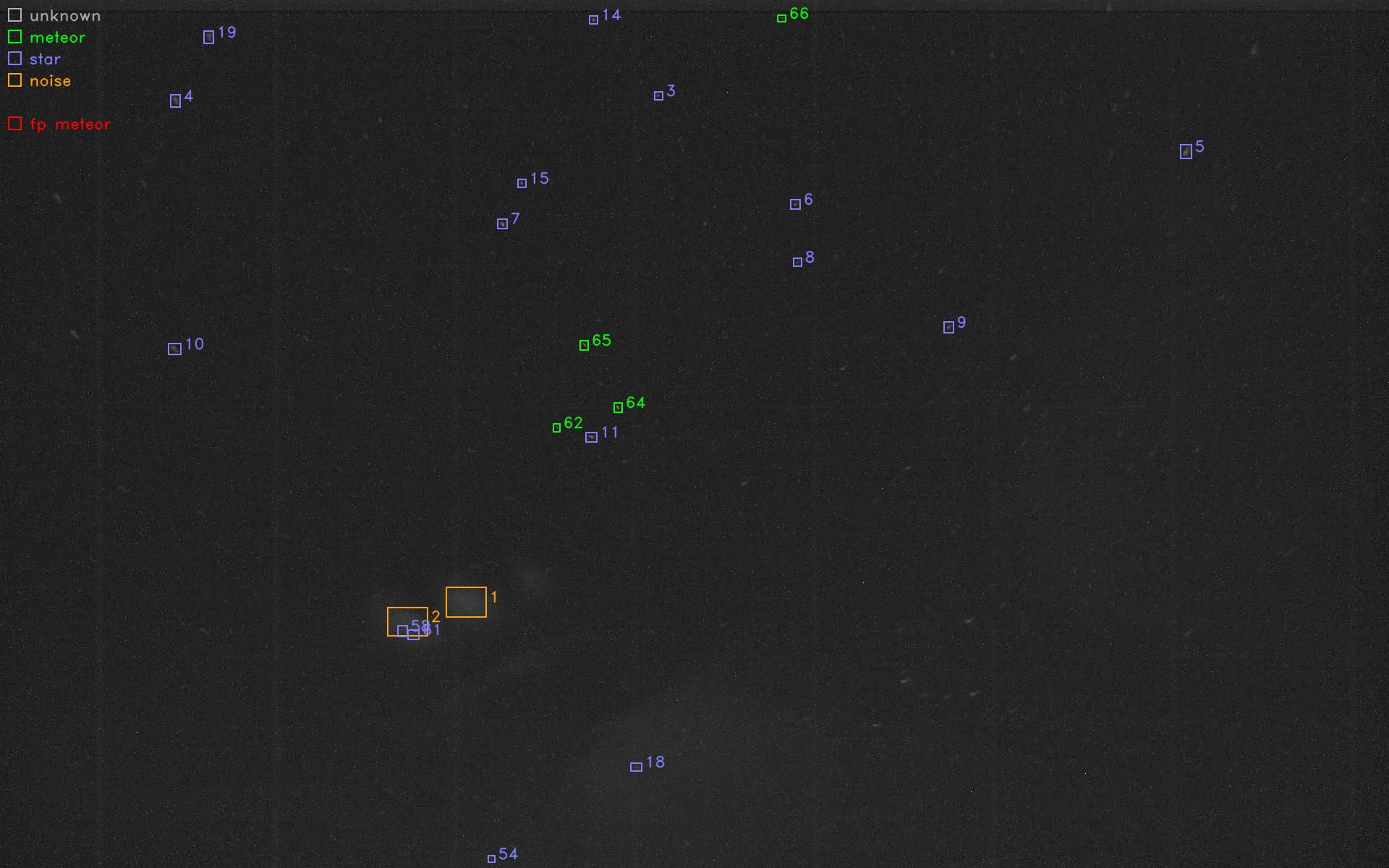
Fig. 1.1 Exemple of meteors detection and visualization.¶
Fig. 1.2 shows an example of detection on one frame. Green BBs represent detected meteors, purple BBs represent detected stars and orange BBs represent detected noise (= something which is not a meteor and not a star).
1.2. Scientific Background¶

Fig. 1.2 The detection chain.¶
Fig. 1.2 presents the whole FMDT’s detection chain. For each pair of images, an intensity hysteresis threshold, a connected component labeling and an analysis algorithm are applied to get a list of CCs with their bounding boxes and surface. Moreover, it also provides the first raw moments to compute the centroid \((x_G,y_G)=(S_x/S,S_y/S)\) of each blob of pixels. A morphological threshold is then done on the surface \(S\) to reject small and big CCs. A k-NN matching is applied to extract pairs of CCs from image \(I_{t+0}\) and \(I_{t+1}\) with \(t\) the image number in the video sequence. These matches are used to perform a first global motion estimation (rigid registration). Note that CCs are sometimes refered as RoIs in this documentation.
This motion estimation is used to classify the CCs into two classes - still stars or moving meteors according to the following criterion: \(|e_k-\bar{e_t}| > \sigma_t\) with \(e_k\) the compensation error of the CC number \(k\), \(\bar{e_t}\) the average error of compensation of all CCs of image \(I_t\) and \(\sigma_t\) the standard deviation of the error. A second motion estimation is done with only star CCs, to get a more accurate motion estimation and a more robust classification. Finally a piece-wise tracking is done by extending the \((t+0,t+1)\) matching with \((t+1,t+2)\) matching (and so on) to reduce the amount of false positive detection.
1.3. Scientific Results¶
IMCCE astronomers (from Paris’s Observatory) led an airborne observation campaign of the 2022 \(\tau\)-Herculids. The 2022 \(\tau\)-Herculids mission is detailed here. The data collected by the mission have been processed with FMDT. The detection results helped the astronomers to see more meteors than their first “manual” detection (by human eyes). From 28 to 34 meteors thanks to FMDT automated detection. Detailed results are available in an article published in the Astronomy & Astrophysics journal [VLC+23].
Some preliminary results about the parallel implementation of the detection chain (see Fig. 1.2) have been presented in a poster [KCM+22] of the workshop AFF3CT. The poster shows results in terms of throughput (FPS), latency and energy consumption. The selected hardware targets match embedded systems constraints (e.g. \(\mathcal{T} \ge 30\) FPS and \(\mathcal{P} \leq 10\) Watts).
1.4. References¶
- KCM+22
Mathuran Kandeepan, Clara Ciocan, Maxime Millet, Manuel Bouyer, Adrien Cassagne, and Lionel Lacassagne. Fast Meteor Detection Toolbox. Workshop AFF3CT, November 2022. Poster. doi:10.13140/RG.2.2.12222.36161.
- VLC+23
Jérémie Vaubaillon, Charlotte Loir, Clara Ciocan, Mathuran Kandeepan, Maxime Millet, Adrien Cassagne, Lionel Lacassagne, Pedro da Fonseca, Fabian Zander, David Buttsworth, Stefan Loehle, Juraj Tóth, Scott Gray, Audrey Moingeon, and Nicolas Rambaux. A 2022 tau-Herculid meteor cluster from an airborne experiment: automated detection, characterization, and consequences for meteoroids. Astronomy and Astrophysics - A&A, 2023. doi:10.1051/0004-6361/202244993.